
Rotate#
Functionality#
This node is used to make general rotation over geometry. It works directly over vertices, not with matrixes. Just like Blender, it offers 3 different types of rotation:
Axis Rotation |
Based on axis (X, Y, Z) and a rotation angle (W) |
Type of Rotation |
Description |
|---|---|
Axis Rotation |
Based on axis (X, Y, Z) and a rotation angle (W) |
Euler Rotation |
Using Euler Gimbal: 3 axis with a hierarchical relationship between them |
Quaternion rotation |
Based on four values (X, Y, Z, W). W value will avoid X, Y, Z rotation |
If you want to learn deeply about all this types of rotation, visit this link: http://wiki.blender.org/index.php/User:Pepribal/Ref/Appendices/Rotation
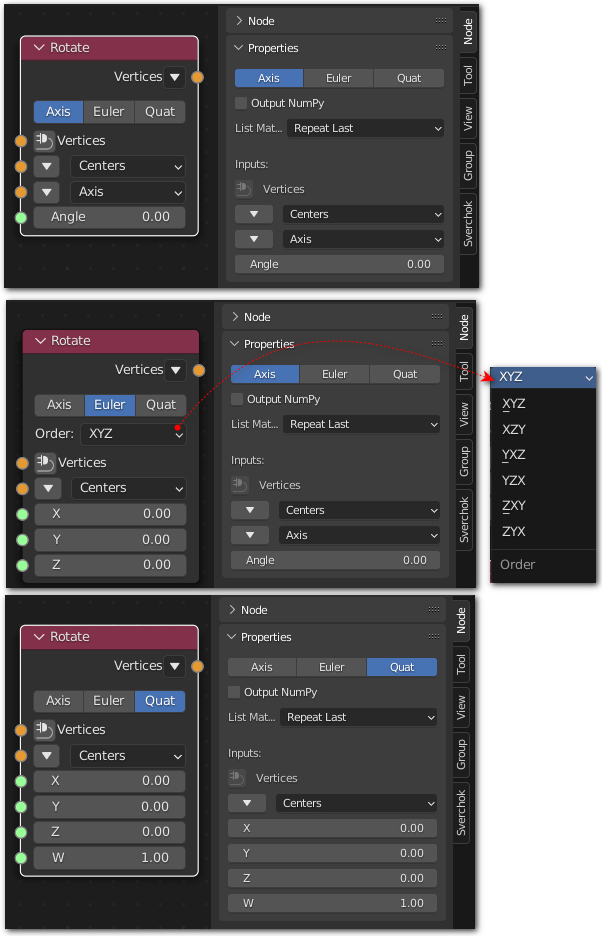
Axis Rotation#
This mode let us define an axis (X, y, Z), a center point and a rotation angle (W), in degrees, around the defined axis.
Inputs#
All inputs are vectorized and they will accept single or multiple values. There is four inputs:
Vertices
Center
Axis
Angle
Parameters#
All parameters except Vertices has a default value. Angle can be given by the node or an external input.
Param |
Type |
Default |
Description |
|---|---|---|---|
Vertices |
Vertices |
none |
vertices to rotate |
Center |
Vertices |
(0.0, 0.0, 0.0) |
point to place the rotation axis |
Axis |
Vector |
(0.0, 0.0, 1.0) |
axis around which rotation will be done |
Angle |
Float |
0.00 |
angle in degrees to make rotation |
Outputs#
Vertices.
Example of usage#
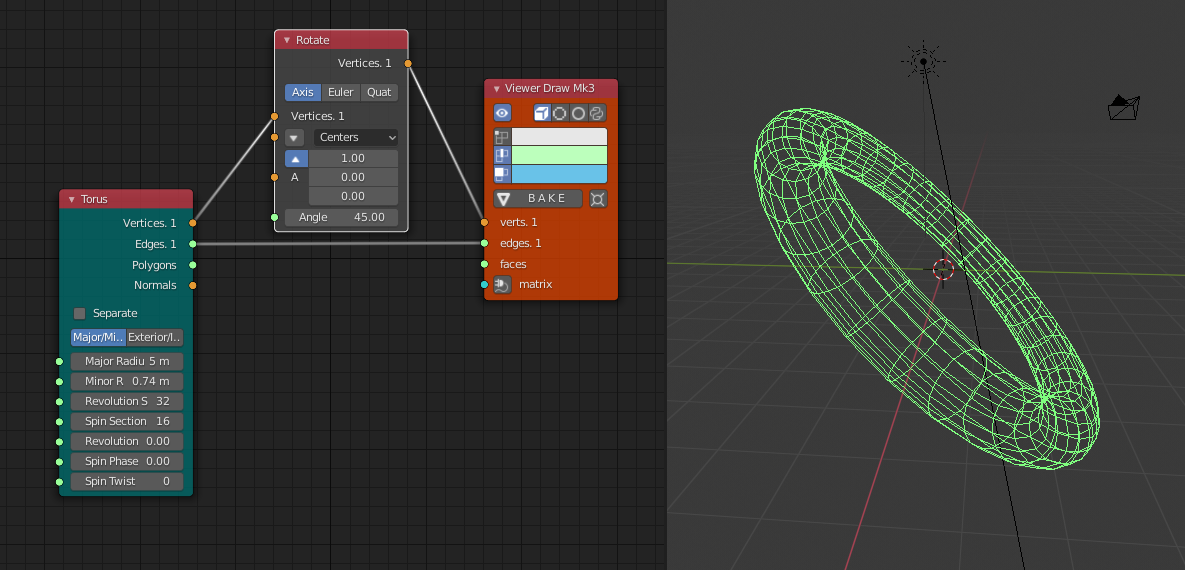
Generator-> Torus
Viz-> Viewer Draw
In this example we use axis rotation to rotate a torus around the X axis 45 degrees .
Euler Rotation#
This mode is used to perform Euler rotations, referred to an Eular gimbal. A gimbal is a set of 3 axis that have a hierarchical relationship between them.
Inputs#
All inputs are vectorized and they will accept single or multiple values. There is four inputs:
Vertices
X
Y
Z
Parameters#
All parameters except Vertices has a default value. X, Y and Z can be given by the node or an external input.
Param |
Type |
Default |
Description |
|---|---|---|---|
Vertices |
Vertices |
none |
vertices to rotate |
X |
Float |
0.00 |
value to X axis rotation |
Y |
Float |
0.00 |
value to Y axis rotation |
Z |
Float |
0.00 |
value to Z axis rotation |
Order |
Enum |
XYZ |
order of the hierarchical relationship between axis |
Outputs#
Vertices
Example of usage#
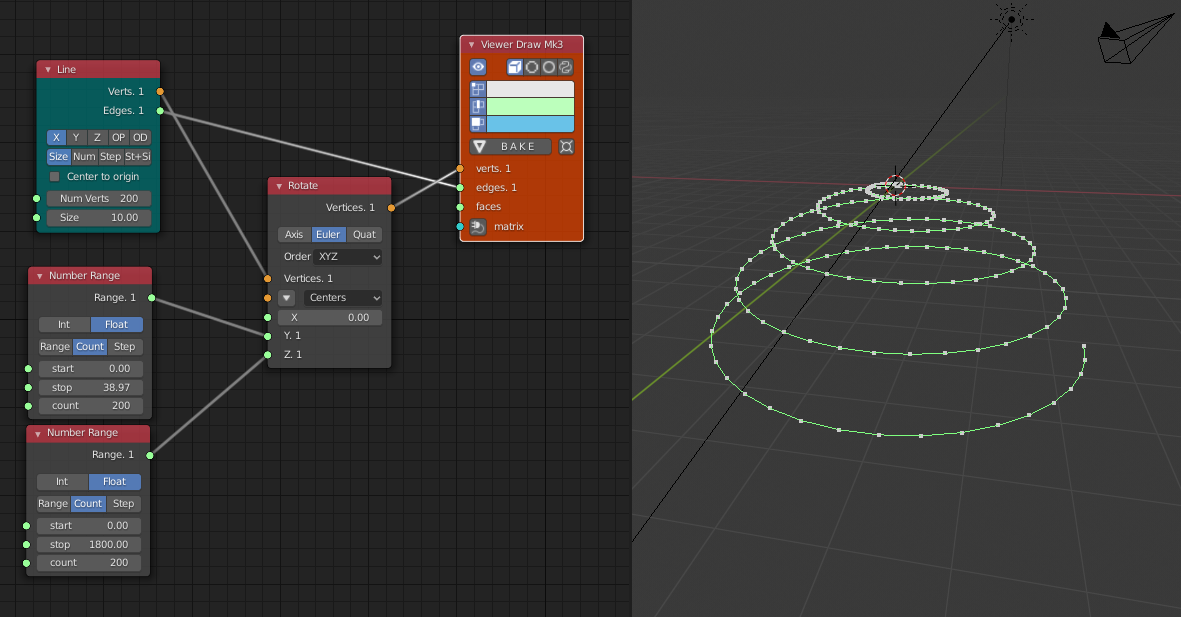
Generator-> Line
Number-> Number Range
Viz-> Viewer Draw
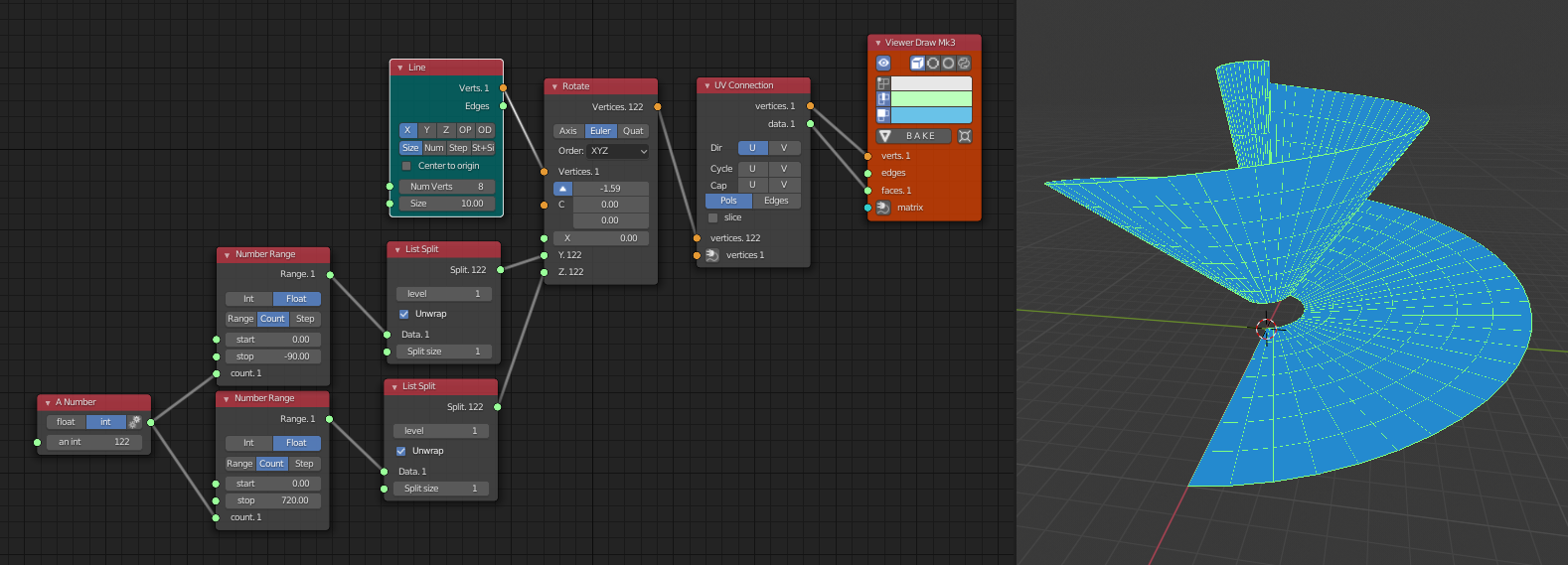
Generator-> Line
Number-> A Number
Number-> Number Range
Modifiers->Modifier Make-> UV Connection
Viz-> Viewer Draw
In the first example we use Euler rotation rotate the vertices of a line to create a 3d spiral The second is more complex, with multiple inputs in Y and Z to create a complex geometry from just one line.
Quaternion Rotation#
In this mode rotation is defined by 4 values (X, Y, Z, W), but it works in a different way than Axis Rotation. The important thing is the relation between all four values. For example, X value rotate the object around X axis up to 180 degrees. The effect of W is to avoid that rotation and leave the element with zero rotation. The final rotation is a combination of all four values.
Inputs#
All inputs are vectorized and they will accept single or multiple values. There is five inputs:
Vertices
X
Y
Z
W
Parameters#
All parameters except Vertices has a default value. X, Y, Z and W can be given by the node or an external input.
Param |
Type |
Default |
Description |
|---|---|---|---|
Vertices |
Vertices |
none |
vertices to rotate |
X |
Float |
0.00 |
value to X axis rotation |
Y |
Float |
0.00 |
value to Y axis rotation |
Z |
Float |
0.00 |
value to Z axis rotation |
W |
Float |
1.00 |
value to Z axis rotation |
Outputs#
Vertices.
Example of usage#
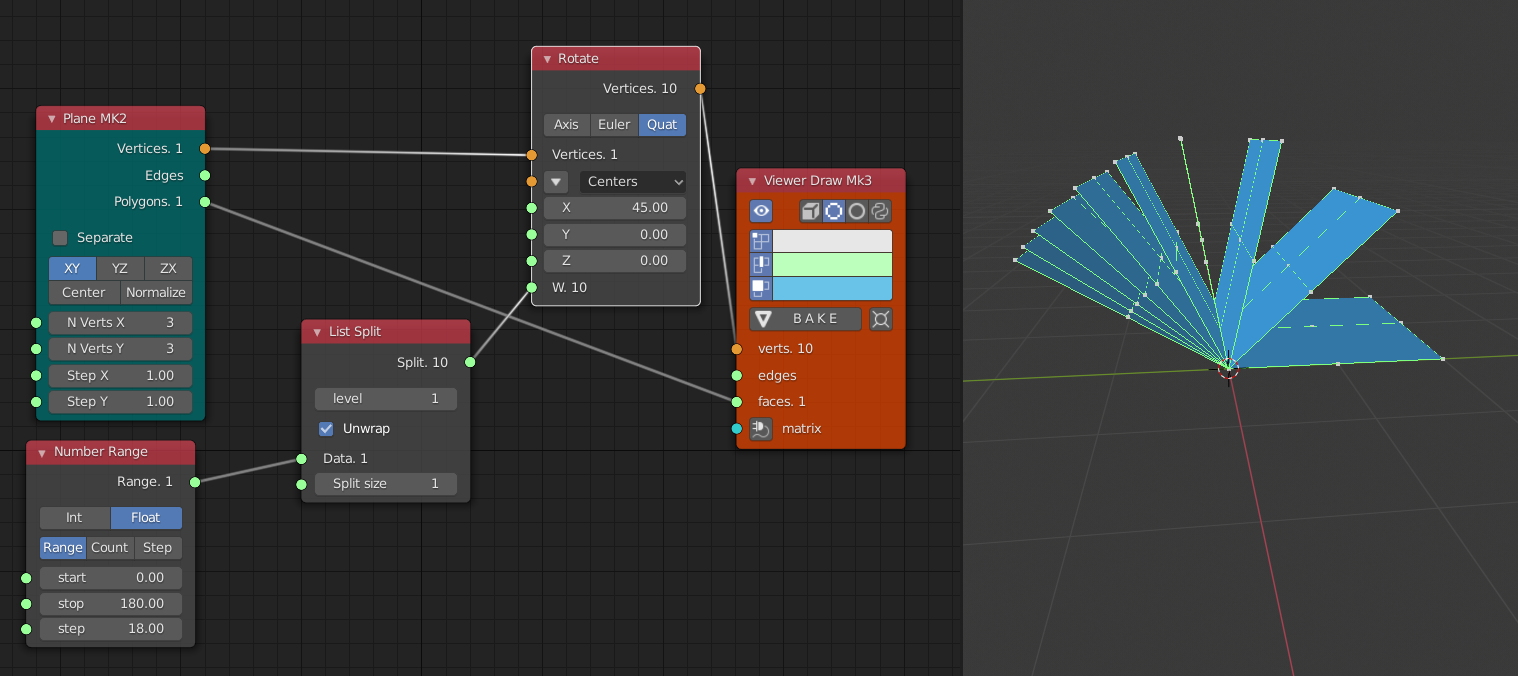
Generator-> Plane
Number-> Number Range
List->List Struct-> List Split
Viz-> Viewer Draw
As we can see in this example, we try to rotate the plan 45 degrees and then set W with multiple values, each higher than before, but the plane is never get to rotate 180 degrees.
Advanced Parameters#
In the N-Panel (and on the right-click menu) you can find:
Output NumPy: Output NumPy arrays in stead of regular lists (makes the node faster when you input one rotation value for each set of vertices)
List Match: Define how list with different lengths should be matched