Rotation difference#
Functionality#
Creates quaternion which produce rotation from first to second given points. It can be alternative of normal matrix node. Meanwhile last one can work only with limited number of axis the rotation difference node can work with arbitrary axes.
Category#
Quaternions -> Rotation difference
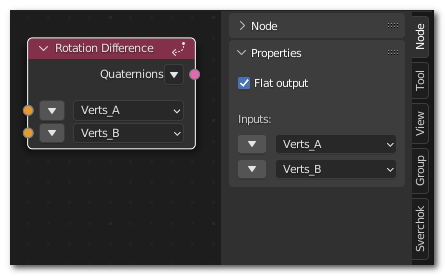
Inputs#
Verts_A - vertices (start of rotation)
Verts_B - vertices (end of rotation)
Outputs#
Quaternions - rotation difference between given points
Parameters#
Parameters |
Type |
Description |
|---|---|---|
Flat output |
bool |
Put all quaternions into flat list |
Usage#
First vector of the node is initial direction of monkey head, second one is direction of empty object:
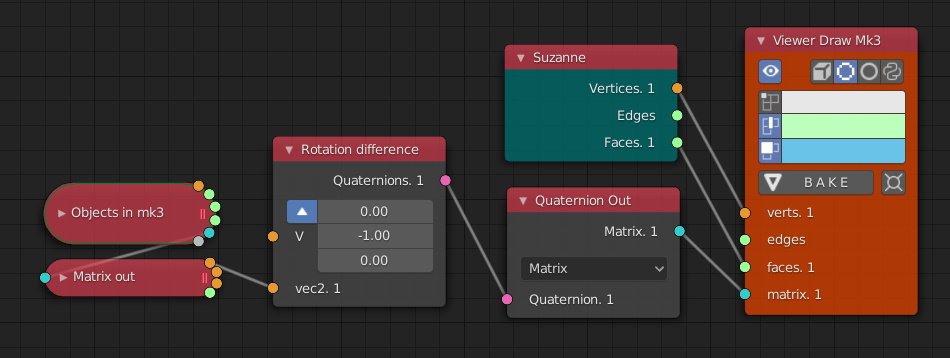
Generator-> Suzanne
Scene-> Objects In Lite
Matrix-> Matrix Out
Quaternion-> Quaternion Out
Viz-> Viewer Draw
Also it is possible to make movements of monkey head more natural by applying Z component separately:
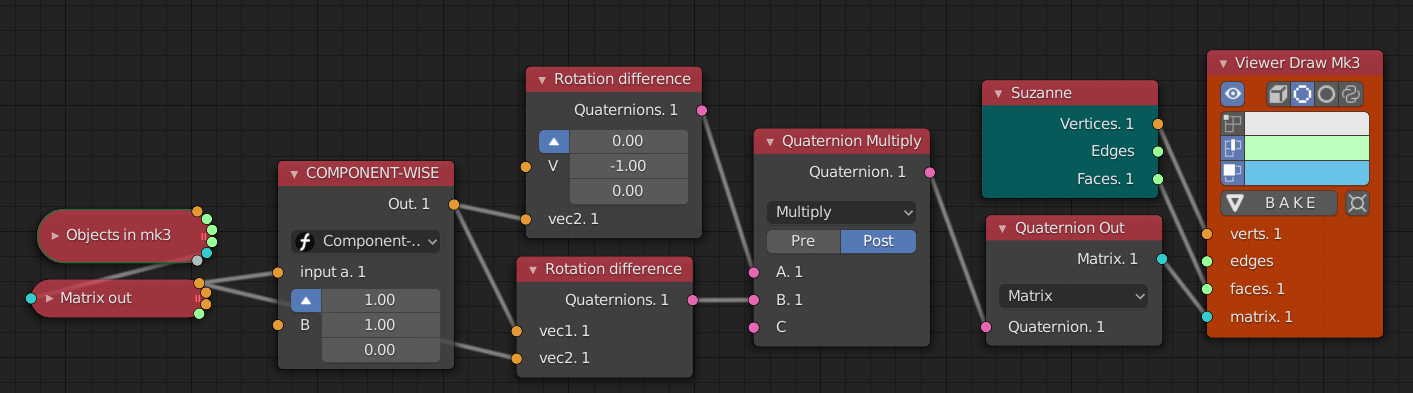
Generator-> Suzanne
Scene-> Objects In Lite
Component-Wise: Vector-> Vector Math
Quaternion-> Quaternion Out
Quaternion Multiply: Quaternion-> Quaternion Math
Viz-> Viewer Draw